
在许多高精度的自动化应用程序中,机器人系统正在取代传统的数控机床。如钻孔、焊接、切割、喷涂、打磨、铣削等。然而,大多数这些高精度的机器人应用程序都是由示教完成(示教程序),而不是直接从CAD数据编程(离线编程)。这主要是由于机器人系统的绝对精度不够。机器人有6个或更多的转动轴,而数控机床,主要通过直线运行轴,所以机器人是很难实现高精度。
上海埃飞电子科技有限公司和美国Dynalog公司合作,开发了机器人精度标定系统,一举解决了机器人精度难题,可以将机器人精度控制在0.1mm。
此套系统由两个产品(1) DynaCalTM(机器人本体校准系统)和(2) DynaGuideTM(机器人轨迹引导系统)这两套设备是提高robot-cell准确性高精度机器人应用程序所必需的。
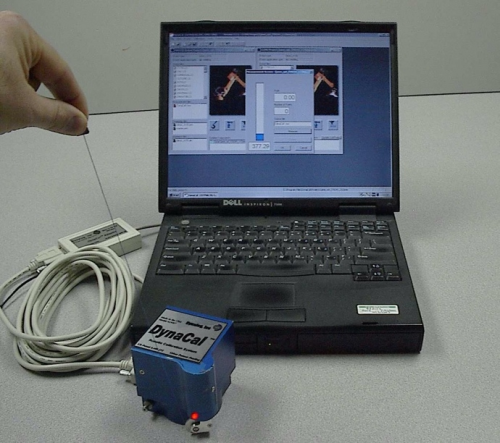
DynaCal系统是离线机器人校准解决方案,用于校准robot-cell,提供最好的robot-cell 准确性。通过测量器来获取机器人校准测量点(50 - 70 测量值)。DynaCal解决方案可以提供校准机器人参数有(如零点位置、连杆长度、减速比,耦合比,TCP 等参数(X,Y,Z,A,B,C),外部轴几何参数(可选), 和部件的位置相对于机器人基座/外部轴框架(X,Y,Z,A,B,C)。
由DynaCal提供准确的校准减少了自适应控制的重复次数,还可以利用DynaGuide系统进一步提高准确性。万一遇到马达更换和复位末端执行器,机器人碰撞或维修的情况下DynaCal 系统也可以恢复机器人的精度。
系统也可以更新的一些机器人控制器的参数,如零点、TCP等。如果模拟一个(CAD)产品是利用生成高精度应用机器人程序,然后补偿的功能可以利用 DynaCal补偿仿真(例如 Delmia)项目机器人控制器的参数不更新,robot-cell 之间的差异在仿真和实际robot-cell时间的误差。补偿机器人程序实现高精度, 减少了自适应控制重复所需要的次数。
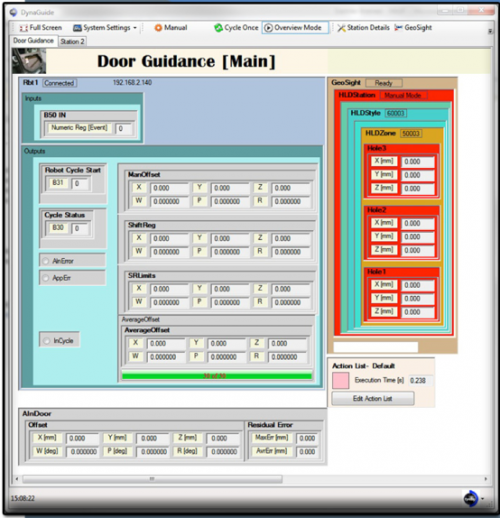
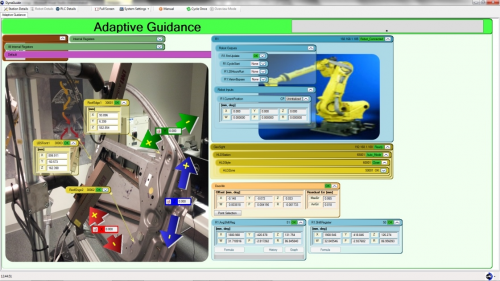
DynaGuide?软件是一套在线的机器人位置校正系统。DynaGuide?软件作为 robot-cell内的中央枢纽,与所有外围设备通信,当然包括所选机器人和测量传感器,PLC 和数据库服务器。
DynaGuide产品有两个数学功能,(1)引导,和(2)自适应控制。DynaGuide引导功能可以定位机器人(X,Y,Z、W、P,R)相对部件的准确度,特别是每个后续的部件相对于机器人不位于同一位置上的应用场景。所确定的6自由度自动转换,测量系统用于测量在零件/基座上面3~4点至定位于零件/基 座至机器人/外部轴框架之间的距离。
DynaGuide自适应控制功能是内联函数,校准了测量机器人的位置,监控机器人在执行程序的时候的变化。反复修正6自由度机器人的精度,直到到达要求的精度。精度主要取决于实现测量系统的准确性和机器人的分辨率。
自适应控制有两种类型:(1)前期静态自适应控制和(2)在生产过程中的静态自适应控制。前期静态自适应控制,仅仅修正适用于机器人生产的第一个部件的位置,随后还可以修正部件的程序。当然后续部件首先要达到同一个位置。此外,此方法不需要专门的测量系统针对 robot-cell。
在生产过程中,每个robot-cell 自适应控制需要一个专用的测量系统。在这种情况下,才能校准机器人的每一个部件。这种方法的优点是从外部纠正了机器人的位置,机器人的自发热产生的漂移,环境温度变化引起的漂移,机器人碰撞产生的误差。此外,这个部件不需要位于一个可重复的位置,因为它的位置可以使用专用的测量系统来确定。
测量系统被放置在无阻挡视觉的里面,当测试的时候测量探头安装在机器人末端执行器。
初步的解决方案,机器人创建以下程序:
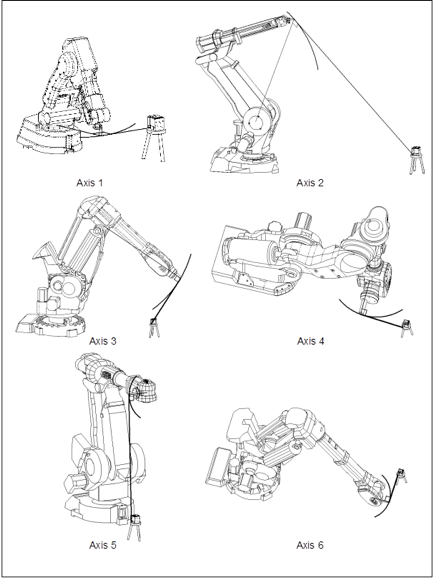
?校准:使用Dynalog测试器,移动机器人的每个轴采集 30-40 个校准点。
?生产:处理机器人的部分程序。
以下的实际步骤是 Dynalog 如何提高机器人精度以及高精度机器人应用程序解决方案:
安装:
i.操作者在零件上面测量一些基准点,再在框架上面设置测量的跟踪器。
ii. DynaCal 机器人校准系统执行完成 robot-cell的程序。执行机器人校准程序,用于测量末端执行器上面的探头与框架上面的测试器之间的距离。DynaCal软件通过测量位置来校准robot-cell的参数,包括机器人的零点,连杆长度,顺从性、TCP、外部轴几何参数和部分的位置相对于机器人基座/外部轴及框架。
iii. 通过上面ii可以计算正确的参数并上传到机器人的控制器,例如机器人的零点、TCP 和使用的框架。
iv. 机器人程序创建一个仿真(CAD)产品(例如 Delmia,RobotMaster)通过 DynaCal 补偿模块,该补偿仿真机器人位置参数不更新的机器人控制器,只是为了找出仿真robot-cell和实际 robot-cell之间的区别。
补偿是为了应用每一个点在机器人的程序里面。补偿位置确保robot-cell的达到最高精度。
使用产品:
i.部件被放入 robot-cell。
ii.在零件/基座上面测量一些基准点,设置测量跟踪器在框架上面的位置。
iii.接下来,执行生产程序并且利用 DynaGuide 自适应控制机器人的位置。DynaGuide系统自动通讯测量跟踪器和机器人控制器。跟踪器是利用反复正确(6自由度)测量机器人的TCP位置,使机器人在每个位置都达到高精度。修正机器人位置并保存在机器人控制器。
iv.如果后续部件与首件位于相同的位置,然后在上面的第三步修正执行生产程序可以在以后的部件。如果不是,那么我的步骤3是重复随后的部件。
精度是通过上述过程保证机器人的应用精度在测量系统的过程中一样的被利用。作为一个强大的生产工具,DynaGuide?软件还提供了所有的必要的错误处理和筛选工具,不受任何外部设备的碰撞或者故障的影响。那么测量获得,修正计算,通讯,等等-自然的发生在几分之一秒。
上海埃飞电子科技有限公司致力于工业机器人的本体的校准和工业机器人性能的评估及工业机器人的应用提供一整套的完整的技术支持。以及高精度的机器人应用提供特别的解决方案。 还可以为广大的工业机器人 制造厂商及工业机器人使用厂商提供创造一个完善的技术支持服务平台,希望为中国的机器人崛起尽我们的一点绵薄之力。
新财网对文中陈述、观点判断保持中立,不对所包含内容的准确性、可靠性或完整性提供任何明示或暗示的保证。读者应详细了解所有相关投资风险,并请自行承担全部责任。本文内容版权归新财网投稿作者所有!










 账号注册
账号注册